|
 上一期视频我们完成了平飞状态下,从elevator到俯仰角速度q的线性化传递函数。本期文章我们接着这部分内容,为这个环节设计一个合理的控制率。 上一期视频我们完成了平飞状态下,从elevator到俯仰角速度q的线性化传递函数。本期文章我们接着这部分内容,为这个环节设计一个合理的控制率。
1、传递函数简化
接上期,我们获得了从elevator到俯仰角速度q的线性化传递函数。  我们来计算一下这个传递函数的零极点。 我们来计算一下这个传递函数的零极点。
[Num,Den]= ss2tf(linsys1.A,linsys1.B,linsys1.c,linsys1.D);
[z,p,k]=tf2zp(Num,Den);
可以看到,零极点的最后两个接近于0可以省略。 ![[Pasted image 20240310204502.png]] 可以去掉z,p最后两位,重新创建传递函数。 可以去掉z,p最后两位,重新创建传递函数。
z_s = z(1:7); p_s = p(1:8); sys_s = zpk(z_s, p_s, k)
 当然这里也可以使用minreal(sys)对其进行简化,但是minreal()函数简化较为保守,仅消去一对零极点。 当然这里也可以使用minreal(sys)对其进行简化,但是minreal()函数简化较为保守,仅消去一对零极点。 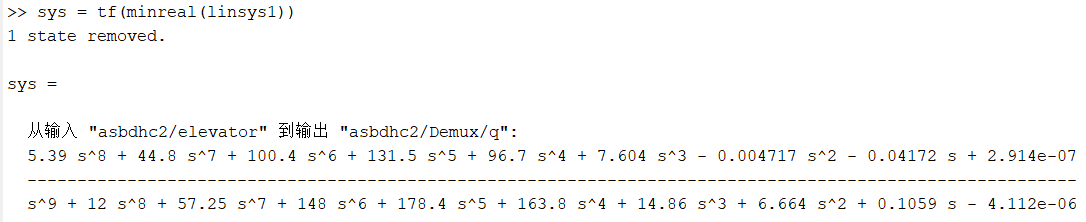
2、控制器设计
打开控制器设计工作箱,在命令行输入
controlSystemDesigner(sys_s)
点击调节方法,添加一个PID调节。  在此界面可以选择使用P,I,PI,PD,PID控制器或设置调节参数。点击更新补偿器后即可完成PID调节。 在此界面可以选择使用P,I,PI,PD,PID控制器或设置调节参数。点击更新补偿器后即可完成PID调节。 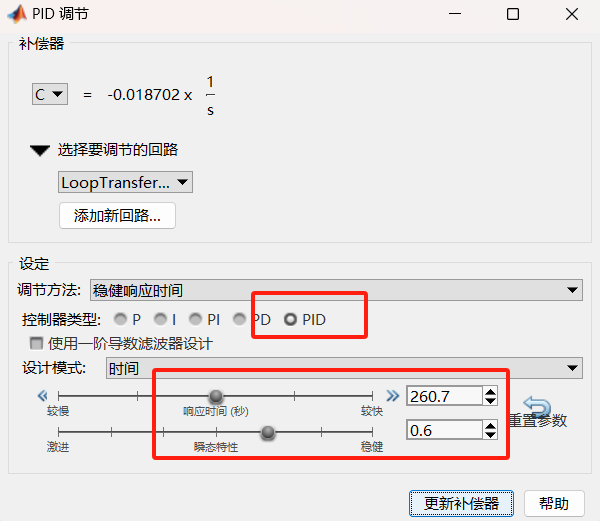 调节后的阶跃响应可以趋于稳定,bode图中存在一个尖峰。 调节后的阶跃响应可以趋于稳定,bode图中存在一个尖峰。  可以添加一个陷波器(陷波器是一种带阻滤波器,能够阻挡指定频率的信号,用于抑制谐振现象),在bode图中右键单击添加一个陷波器,点击尖峰处即可调节。 可以添加一个陷波器(陷波器是一种带阻滤波器,能够阻挡指定频率的信号,用于抑制谐振现象),在bode图中右键单击添加一个陷波器,点击尖峰处即可调节。 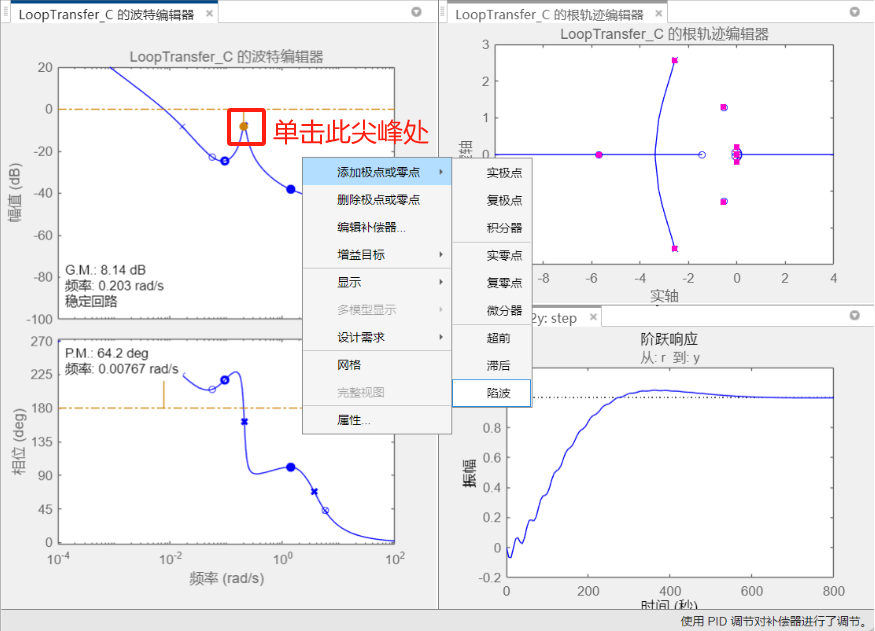 完成调节后,在bode图中按住曲线上下拖动,可以更改k值,查看阶跃响应图,直到找到自己满意阶跃响应图。 完成调节后,在bode图中按住曲线上下拖动,可以更改k值,查看阶跃响应图,直到找到自己满意阶跃响应图。  将设计好的控制器导出至MATLAB工作区,命令行输入C查看控制器。 将设计好的控制器导出至MATLAB工作区,命令行输入C查看控制器。 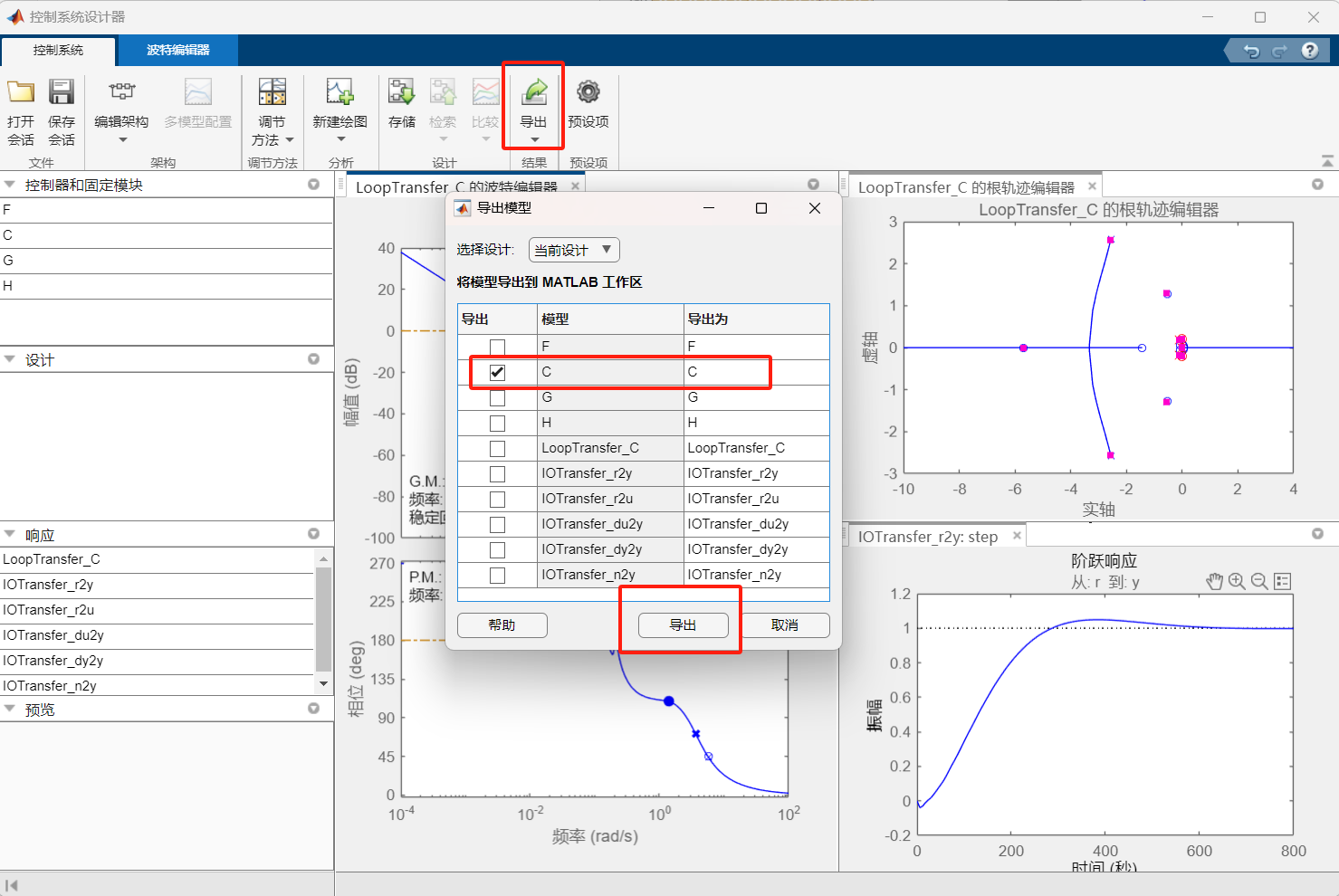 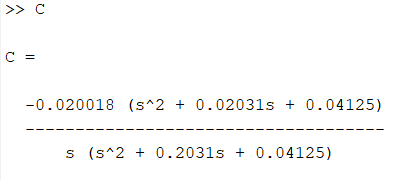 在Simulink中,使用两个LTI System模块,搭建阶跃响应下,带有控制器环节的单位负反馈模型,仿真时间设置为800。 在Simulink中,使用两个LTI System模块,搭建阶跃响应下,带有控制器环节的单位负反馈模型,仿真时间设置为800。  可以看到,对比上述控制器设计环节的阶跃响应图,两者基本一致。 ![[Pasted image 20240310220858.png]] 可以看到,对比上述控制器设计环节的阶跃响应图,两者基本一致。 ![[Pasted image 20240310220858.png]]
3、小结
本期主要针对上期的俯仰角速度回路设计了一个PID+陷波控制器,主要基于MATLAB现有工具箱,带领大家对控制器设计有一个基本流程框架。本教程不涉及具体PID某些参数计算确定,这部分知识可以参考教科书讲解。
下一期将会带来自驾仪设计。 END
迅翼SwiftWing致力于固定翼技术共享,汇聚固定翼领域技术极客,推动固定翼技术持续创新!
|